【概述】-Linux内核三驾马车之-进程管理
进程管理是Linux内核三架马车之一,也是学习Linux的人最早接触的知识点,它虽然比内存、IO更容易懂,但是因为它应用范围之普遍,但凡是涉及Linux的开发者不管是用户态程序开发还是内核态程序开发,进程管理这部分知识点都必须引起重视,这是开发者唯一无法避开的部分。
进程的生命周期
进程与线程
进程封装的资源包括:内存、文件、文件系统、信号、控制台等等。一个进程区别于另外一个进程的标记就是占有的资源完全不一样。
基于以上,那么在任何一个OS中描述进程,我们只需要去描述它的资源即可。通常我们使用一个数据结构PCB(Process Control Block)进程控制块来描述一个进程。在不同的OS中表现是不一样的,对于Linux操作系统,我们使用task_struct描述一个进程。
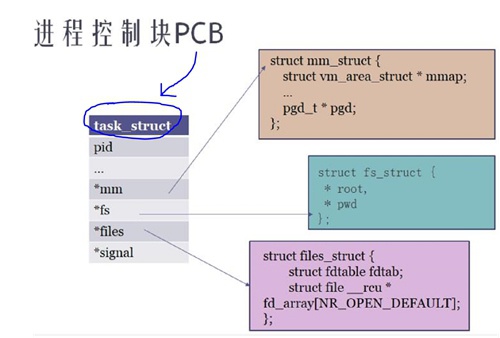
上图显示,包含的资源有:
- pid表示一个进程的ID资源
- mm_struct表示内存资源
- fs_struct表示文件系统资源
- files_struct表示打开的文件资源
- signal_struct表示信号资源
- ...
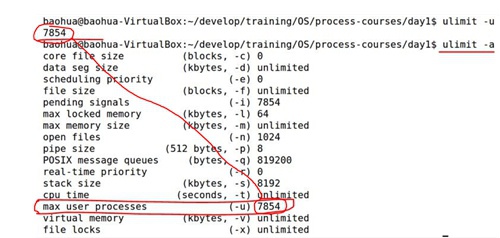
比如,我们可以使用下面的“fork炸弹”来Linux的pid资源耗尽,让Linux挂掉
:(){:|:&};: //会不停创建进程,pid资源耗尽而挂掉,在32bit系统中最多32768个进程pid再比如,除了Linux总的pid是有限的以外,每个用户的pid也是有限的,可以通过ulimit命令查看
ulimit -a 或者ulimit -u
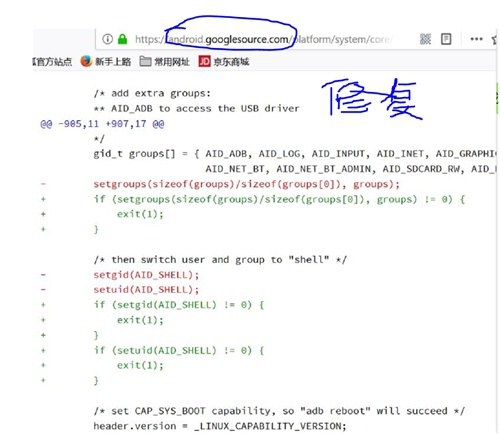
Android 2.2之前版本一键root的bug
- adb以root运行
- adb进程调用setuid(shell)权限降级,以上没有判断返回值
此时如果首先将shell用户的pid资源占用完,那么setuid(shell)会失败掉,这时因为没有判断返回值就导致adb降权不成功!
具体分析可以参考如下链接:Android提权漏洞分析——rageagainstthecage
Linux内核调度器是以线程为单位进行调度和上下文切换的。
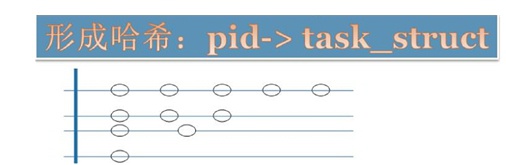
task_struct以及task_struct之间的关系
在Linux里面task_struct的组织并行使用了三个数据结构,典型的以空间换时间思路:
- 链表:Linux中所有的task_struct串在了一个链表上

-
树:Linux中的进程都有父子关系,这样通过指针互指形成了树形结构。可以通过
pstree命令查看
- 哈希表:Linux的pid映射到task_struct,这是为了通过pid快速检索进程
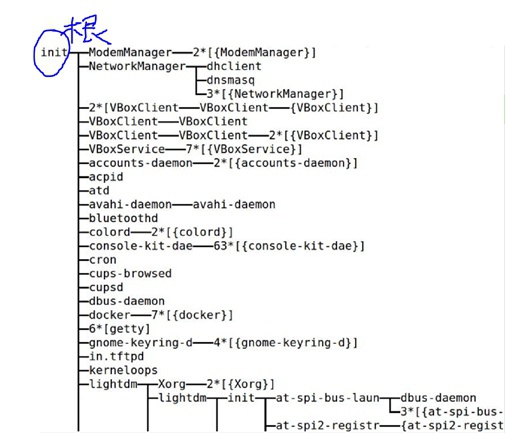
这棵树在Linux的进程管理里面是非常重要的,因为Linux的父进程类似子进程的“监控器”,父进程可以知道子进程挂掉的原因、释放子进程的遗留资源等等。同时父进程会根据子进程重要性,在监控到子进程死掉之后采取重启等策略。
进程状态
一般情况下任何一个操作系统进程都会有三态的转换:就绪<==>运行<==>睡眠。
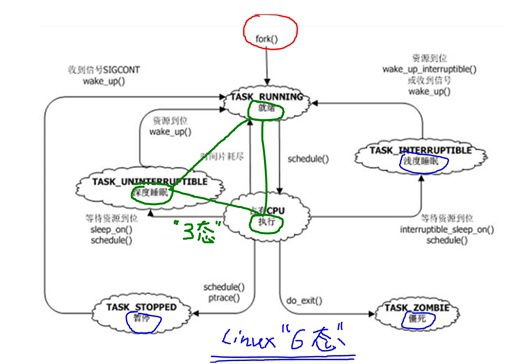
- 就绪:只差被CPU执行,通常放在Linux内核CPU runqueue队列中还没有被调度到的线程是这个状态。
- 运行:已经在CPU上运行,正在CPU跑着。
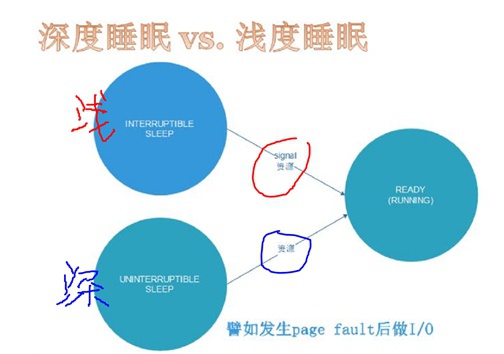
- 深睡眠:等待资源,不可被中断,直到资源到位
- 浅睡眠:等待资源,可以被中断,资源到位或者信号打断
- 停止:一种是收到SIGSTOP信号(ctrl+z)、一种是ptrace调试时当attach上之后就是停止态,当收到SIGCONT信号时转换到就绪态
- 僵死:进程退出,只剩下task_struct结构体标名退出原因
Tips:
Linux的“核内”调度算法(如CFS)就是管理“就绪<==>运行”之间切换,即只涉及单个core的runqueue上线程切换;
而“核间”调度算法(如EAS)管不同core之前runqueue上线程的迁移;
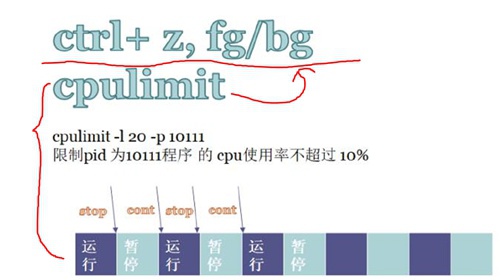
作业控制 —— Job Control:
- CTRL+z:发送SIGSTOP信号让进程转到“暂停态”,后续可以继续执行
- fg:继续执行,前台执行
- bg:继续执行,后台执行
- cpulimit:使用作业控制来限制进程cpu利用率,比如
cpulimit -l 20 -p $PID
Fork与僵尸
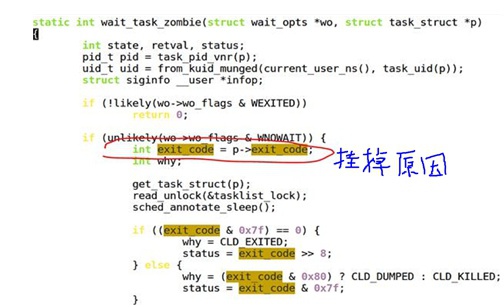
“僵尸”就是一个挂掉的进程的task_struct结构体,它里面的所有资源都已经被释放掉了,只剩下task_struct这个结构体去告之父进程自己挂掉的原因。这个操作是通过设置task_struct->exit_code退出码来完成的。
Tips:
当一个进程变成僵尸时所有资源都被Linux Kernel自动free掉了,除了剩下task_struct这个“空壳” — 僵尸。
僵尸态进程,在ps命令显示时,是加“[ ]”的,标识该进程是个已死的僵尸
当一个进程变成僵尸态之后,是无法被各种信号干掉的,唯一干掉僵尸的办法是:
- 父进程通过wait去处理已经退出的子进程
- 直接干掉僵尸进程的父进程
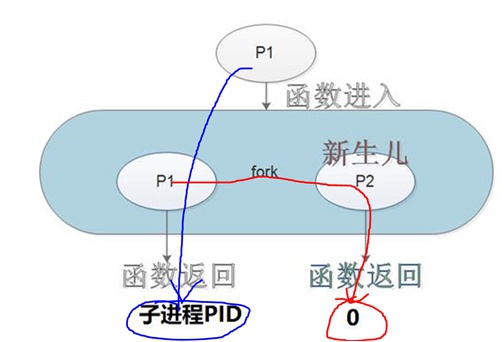
将父进程copy一份给子进程,父子进程返回值不同,父进程返回子进程PID、子进程返回0:
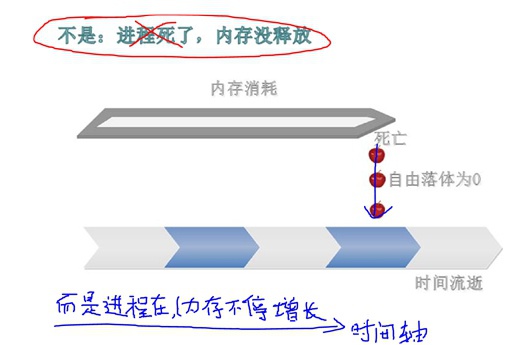
内存泄漏的涵义
内存泄漏是指,随着时间的推移,进程消耗的物理内存越来越多、越来越多,内存消耗成发散状态。
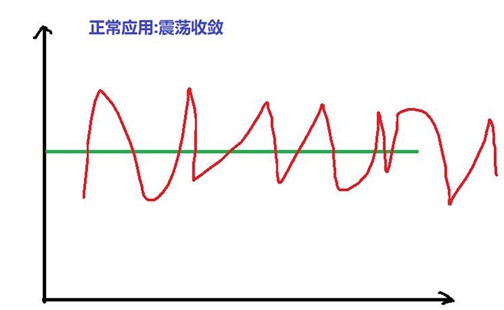
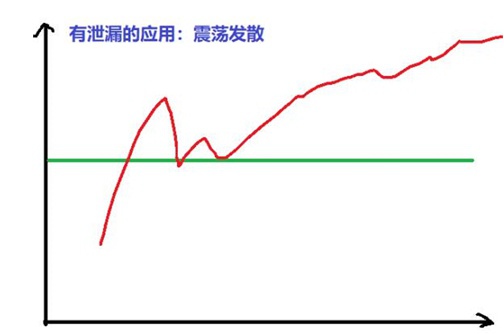
Linux中判断进程内存泄漏的办法:连续多点采样法,然后按照时间轴联线看曲线规律
- 正常的内存使用 —— 震荡收敛
- 异常的内存使用 —— 震荡发散
进程与线程的创建
fork、vfork、clone
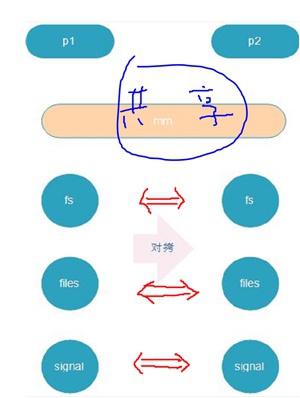
当通过fork创建一个process进程时,Linux内核除了创建一个全新的task_struct以外,还会创建各种资源的struct结构体,比如mm_struct、file_struct、fs_struct等等...
Tips:
需要注意的是:Linux会马上将父进程的资源copy一份给子进程,但只是需要将资源的指针赋值即可,这时父子进程此时仍在指向同一套资源内容。
因此,当我们刚调用完fork后、在还没有其它动作之前,基本就会出现如下逻辑:

在没有MMU的Linux系统中是不支持fork()系统调用的,只有vfork系统调用。(具体原因见下面cow写时拷贝章节)
当然在有MMU的Linux系统中也是有vfork这个系统调用的。
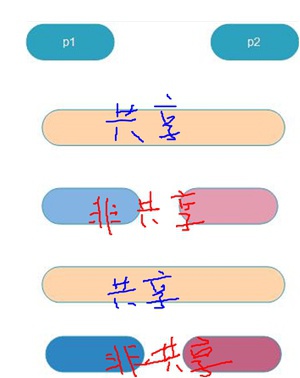
vfork与fork最大的区别是,vfork出来的父子进程内存资源mm_struct是共享的:
vfork还有一个特点:当父进程通过vfork创建了子进程,vfork会阻塞住父进程,直到子进程退出、或者子进程调用了exec函数族。
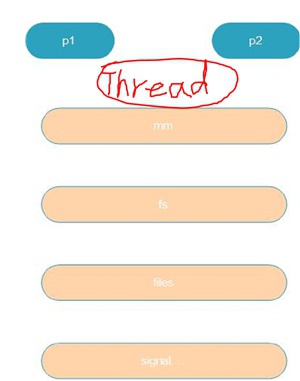
这个clone函数是Linux提供的创建线程的系统调用函数,当通过pthread_create函数创建线程时时最终要调用到clone这个函数,里面会带有一系列的标记,将子进程的所有资源都指向父进程,即父子一直共享资源。 这就是线程!!!task_struct不同,但是资源相同!!!
在Linux中,我们是可以直接调用clone这个系统调用、并且可以自己传入一些clone_flags,这样程序员就可以自己创造一个“既非进程关系、又非线程关系”的task_struct关系,我们可以把这种另类的东西叫做“人妖” :)
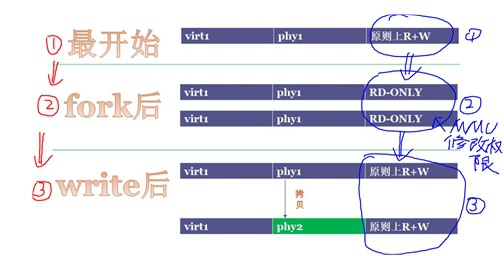
cow写时拷贝
写时拷贝技术是Linux系统中非常有识别度的技术之一,用在很多地方,比如fork进程、RCU更新等等。
比如在fork时,本来父子进程指向同一套资源,但当父进程去写mm_struct时,Linux内核就会申请一个空间、将mm_struct这个资源copy一份相同的到新开辟的空间上,然后将新空间指针赋值给父进程、并改写需要去写的mm_struct内容。如果子进程去写mm_struct资源时,就会给子进程分裂出去一块资源,总之COW的原则就是谁写谁分裂。
Tips:
这里需要注意的是,mm_struct是内存资源,其它资源都好说,只有分裂内存资源是比较困难的,必须借助硬件MMU单元进行。
这里COW过程中有MMU修改页表权限、以及写时一次缺页异常的触发过程,只有当有MMU时才会有这种虚实转换。
切记:当没有MMU时,没有虚实转换、没有缺页异常触发,因此没有MMU的平台上,Linux内核是不支持fork()这个系统调用的!!此时创建进程需要使用的系统调用是vfork()
thread线程的本质
操作系统中关于线程的定义就是:能单独调度(在Linux上即有独立的task_struct),但又相互共享同样资源。
在Linux上,我们使用pthread_create()这个系统调用API来创建线程,它会带入的参数标记是:
clone_flags=CLONE_VM|CLONE_FS|CLONE_FILES|CLONE_SIGHAND|CLONE_THREAD|...在Linux内核中创建进程和线程,入口是统一的均是do_fork(),但是pthread_create=>clone=>do_fork会传入以上clone_flags参数,标识这些资源需要共享,这就成了创建线程的概念了!
因此,Linux中的线程又叫做轻量级进程,Light Weight Process,缩写是LWP。
POSIX标准对进程、线程的要求
POSIX标准要求同一个进程内的多个线程应该有同一个的pid,但是Linux对于线程、进程的实现上都是用task_struct去描述,它们有自己独立的pid,这就不符合POSIX标准了。
为了符合POSIX标准,Linux使用了一个小小的欺骗障眼法:
在Linux内核中增加了一个TGID,并让同一个进程中的所有线程的TGID都等于线程1的pid1,同时让getpid()这个API返回值就是TGID值。
这样无论在哪个线程中调用getpid时,获取到的PID都是TGID,也就是线程1的pid,也就是进程的pid。
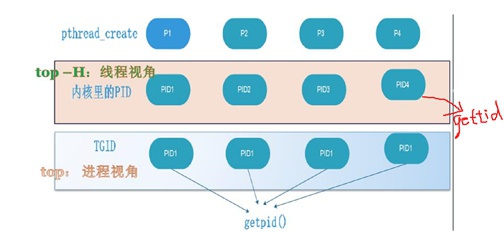
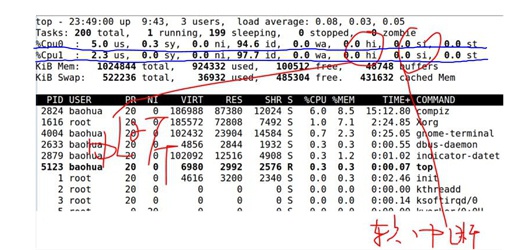
这里也涉及到不同命令对于pid的使用,比如:top命令,当我们直接敲top时显示的是TGID,而当我们使用top -H时显示的是每个线程真正的PID。
进程托孤
在Linux中当子进程死掉,父进程会去“收(僵)尸”,但是当父进程先死掉的话呢,那么就需进程托孤,即必须给一个进程找到一个“爸爸”。
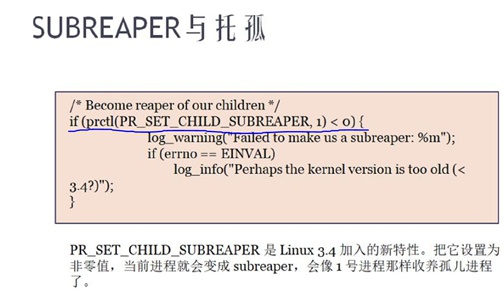
在早期版本的Linux内核中,当父进程死掉时,都是直接托孤给init进程。但是新版本的Linux内核中子进程可以被托孤给进程树上把自己声明为“subreaper”的进程。
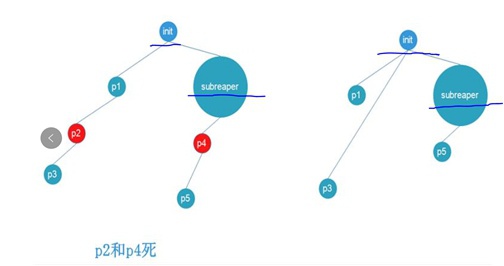
总之,进程托孤要么托孤给init、要么托孤给subreaper。但是一个充当subreaper的进程需要做好准备,注意需要掉wait去获取子进程状态。自从有了subreaper之后,Linux的层次感就比之前更强了一些。
进程睡眠、等待队列
进程睡眠分类
- 深度睡眠:等待资源,只能被资源唤醒
- 浅度睡眠:等待资源/信号,能被资源/信号唤醒
进程睡眠唤醒转换
- 运行==>睡眠:
在Linux中,睡眠的task_struct都会被挂在某个waitqueue上,这waitqueue是等待同一个资源的等待队列,只要等待同样资源的进程都能被挂到同一个waitqueue上。挂入waitqueue的动作是进程代码中自己写的,如下几步:
- 声明等待队列
- 把current变量(自己的task_struct)加入等待队列
- 设置自身状态
- 调用schedule
- (唤醒后)继续执行...
- 睡眠==>唤醒:
当资源来到时,整个waitqueue会被唤醒,此时挂在waitqueue上的进程就都被唤醒了。这里所谓唤醒,即使用wake_up/wake_up_interrupt去修改等待队列上各个task_struct的状态
__set_XXX_state(TASK_RUNNING)。移出等待队列,如下一步即可:- 在写资源的代码中准备好资源
- 在写资源的代码中调用wake_up/wake_up_intteruptible唤醒对应的等待队列
进程0、进程1
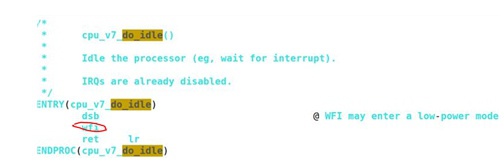
在Linux中,init进程是pid=1的第一个用户态进程,但是Linux中第一个进程却是进程swapper它的pid=0是idle进程。
对于idle进程,它是在Linux Kernel初始化的时候创建的第一个进程。
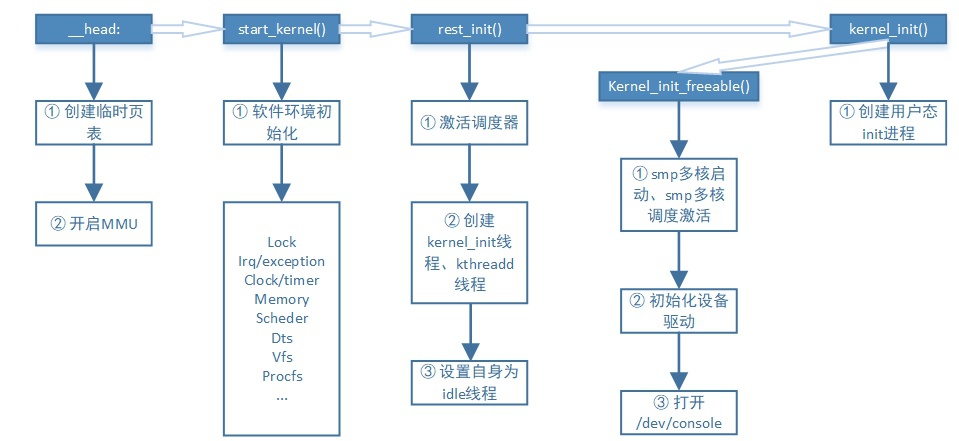
从Kernel进入C语言函数start_kernel()开始,我们可以大概把Linux启动分为三个阶段:
- ① start_kernel阶段:
该阶段主要是准备内核运行的各种软件环境,比如初始化irq、memory建立页表、VFS、scheduler等等
- ② rest_init阶段:
该阶段主要是激活调度器,创建kernel_init、kthreadd线程将Kernel从单线程变为多线程,同时这里把自身设置为idle线程。idle进程0是优先级最低的,它会把CPU置为“低功耗状态WFI”,并循环检测是否有比自己优先级高的进程,如果有的话,就调用schdule进行切换。Linux这个设计是非常牛的,把跑、不跑全都变成了跑...完全的进程之间去耦合了...
- ③ kernel_init阶段
这个阶段分成2个步骤:
- kernel_init_freeable:主要是激活smp多核、激活smp多核调度、初始化设备驱动、打开console
- 然后就开始创建init进程,即 第一个用户态进程,并切换到用户态
init进程是第一个用户态进程,它的父进程是进程0这个swapper进程。
进程与线程的优先级与调度
调度算法的设计目标
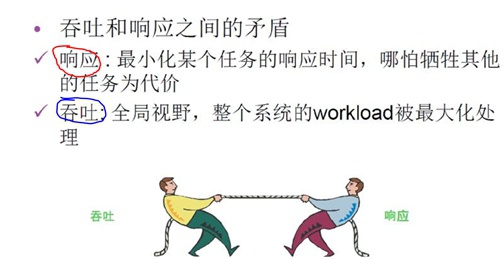
一个操作系统调度器设计追求的第一个目标:吞吐大/响应快
- ① 吞吐量大:
单位时间内做的有用功多,就是吞吐量大,反应到调度算法上,就是让进程切换时消耗尽量小(保存、切换、CacheMiss等等非有用功要少),即花费在非进程运行上的时间要尽量小。吞吐最求的是整个系统要把时间花费在有用的事情上,服务更多用户,是全局视野。
- ② 响应快:
指的是高优先级需要先处理,延迟低。响应追求的是某个特定的任务延迟低,是局部视野。
其实吞吐和响应是一对儿矛盾,那么调度器就是这对儿矛盾的结合体:
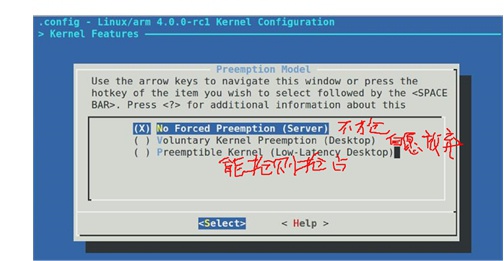
因此:
- 想吞吐高,就需要“抢占少”,极端情况就是一直运行一个进程,基本就是Server的思路。
- 想响应快,就需要“抢占多”,要积极的去抢占,让高优先级的立刻执行,基本就是Desktop的思路。
一个操作系统调度器设计追求的第二个目标:平衡CPU消耗/IO消耗优先级
- ① CPU消耗型:
CPU利用率很高,大部分时间都在CPU上做运算,CPU利用率很高。
- ② IO消耗型:
消耗CPU很少,绝大多数时间CPU都在等IO完成,CPU利用率很低。
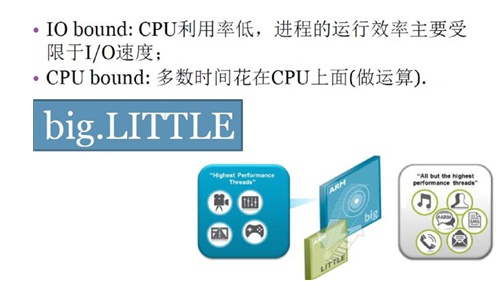
Tips:
ARM公司的CPU的big-Litte架构正是基于以上原理来实现的,将IO消耗型的调度到“小核”上,将CPU消耗型的调度到“大核”上。
这样就能用大概4大+4小核架构实现接近8大核的性能,且功耗要低很多。
因此,在big-Litte这类架构上,像EAS这种SMP多核调度器的设计就尤为重要了。
进程与线程优先级
Linux的调度算法必须结合两个东西:
- 策略
- 优先级
Tips:
注意一个最基本点:Linux内核只提供机制,不提供策略,这是Linux系统设计的原则之一
内核把所有进程/线程的优先级分成0~139之间,值越小优先级越高(0最高):
- 优先级0~99是RT进程,采用RT策略,两个调度策略:
- SCHED-FIFO:同等优先级,除非自己schedule走,否则一直会占用CPU;不同优先级时,高优先级立即抢占。
- SCHED-RR:同等优先级,按照时间片轮转;不同优先级时,高优先级立即抢占。
- 优先级100~139是Normal进程,一个调度策略:
- 基于nice值:-20~19来对应优先级100~139,即nice值越高对应的优先级越低。(越nice优先级越低)
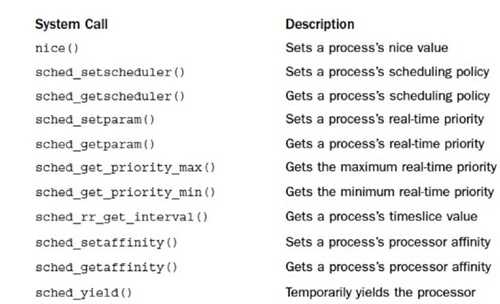
设置调度相关的系统调用
进程的调度策略和优先级是可以被程序员设置的,如下给出了各个API和功能描述:
CFS调度算法
学习CFS调度算法需要注意三点
- 只是核内调度算法。即:针对同一个core上runqueue队列中task_struct来进行调度
- 只处理TASK_RUNNING状态(就绪/执行)的task_struct。即:只能是挂载runqueue里面的
- 只针对normal线程。即:不能针对RT线程
最初的基本逻辑是:
奖惩机制,只针对Normal线程,运行时间越长,nice值会逐渐增加权重,以这样的办法去降低Normal线程的优先级。
在V2.6版本内核又增加了两个补丁:
① RT熔断机制:(通过RT运行时长门限,让RT线程能给Normal线程运行的机会)
—— 设置RT线程在“长度为period的时间段”内最多只能运行“runtime的时长”
Tips:
这个熔断机制很难被触发,通常是不会被用到的,一旦出现这种情况,大概率意味着RT线程里面遇到什么bug了,可以去调查一下
另外,这个熔断机制默认是不开启的,通常以下两个值都是950000
/proc/sys/kernel/sched_rt_period_us
/proc/sys/kernel/sched_rt_runtime_us
② 普通进程的调度算法CFS:(改变了最开始的奖惩机制的逻辑)
完全公平调度算法,该调度算法的核心数据结构是一颗红黑树(rbtree)。红黑树是左边节点小于右边节点,右边节点又小于最右边节点的二叉树。
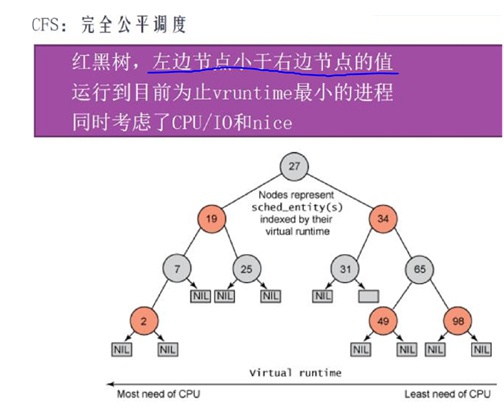
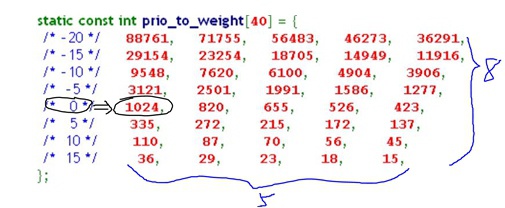
- 其中里面的数字是普通优先级线程的“虚拟”运行时间:
vtime=ptime*1024/weight,ptime是线程运行的“物理”时间 - weight是权重,它是由nice值直接决定的,一一对应关系:
- Linux每次调度选择的是虚拟时间最小的线程执行:
就是rbtree的最左边节点,当被选择的线程执行时实际物理时间ptime会增加,就会导致vtime变大
当vtime超过它右边最少1个节点的时候,它就会被从原来位置拿掉并插入到这些节点的右边
这样下次调度还是会选择rbtree上最左边的节点来跑,这样完成调度过程 - 照顾IO型线程:因为IO型容易睡眠,造成实际运行的ptime会比较小,即公式分子分子小,这样计算完vtime会小,它容易在树的左边
- 照顾nice值低的线程:因为nice值低时,查weight表得出的分母大,这样计算完的vtime也会小,它也容易在树的左边
Tips:
可以使用nice值去启动一个task,比如:sudo nice -5 ./a.out
使用renice命令用来修改线程nice值,比如:sudo renice -n -5 -g $PID,-g是所有线程生效,-p是对某一个单独线程生效
Normal线程转化为RT线程
一个普通线程,我们可以使用两种办法将之转化为RT线程:
可以使用如下代码做转换:
struct sched_param the_priority;
the_priority.sched_priority = 50;
pthread_setschedparam(pthread_self(), SCHED_FIFO, &the_priority);chrt是一个非常好玩儿的工具,可以将一个普通线程修改成一个RT类型的线程.
比如将一个普通进程所有线程都设置成SCHED FIFO类型的:
sudo chrt -f -a -p $Priority $PID Tips:
我们可以做一个试验,首先设置RT线程的熔断值,比如1s内运行800ms就熔断(80%),然后开启两个CPU利用100%的普通线程,总体200%
当我们把普通线程修改成RT线程的时候,会发现CPU利用率从200%将为160%,但是用户体验却变差了,点鼠标等响应很慢
这说明了,CPU利用率高不一定用户体验差,CPU利用率低也不一定用户体验好,需要看线程优先级!!! 切记!!!
工程 — 性能与实时性
多核负载均衡
当有多个core/super-thread时,不能将大部分甚至所有的task_struct都集中到某一个core或者某几个core上去运行,而应该平均分配。(这里不包含根据性能要求,调度算法对task_struct进行IO型/CPU型分类去故意分core调度的情况)
Load-Balance感性认识:当一个进程(两个线程)死循环时,
- 当top命令查看时,发现该进程CPU占用率是200%,是因为2个线程被自动瓜分到2个core上去了。
- 当time去执行它时,发现使用时间user+sys≈2*real,是因为当内核统计进程运行时间时是将2个core的时间都统计进去+在一起了。
当Linux运行时,每个core可能将task_struct推到其它core(push),或者从其它core拉task_struct到本core(pull),内核调度模块会不停的做推push/拉pull操作。这是一个典型的分布式系统,core与core之间有分布式握手。
负载均衡分类
- RT任务的负载均衡:
让N个优先级最高的RT任务自动分派到N个core上去同时运行
- Normal任务的负载均衡:
在一些周期性的时间点上,比如时钟Tick点上,每个核都会查自己和附近的core的负载情况,然后就做push/pull动作;
- Idle时负载均衡:
在Idle前先查看附近的core是否负载较重,如果是则pull动作;
- Fork/Exec创建任务时负载均衡:
会找一个负载最轻的core,然后push到该core上去运行;
负载均衡是自动做的,但是Linux有2种方法可以去修改task的亲和力(affinity):
① 可以在程序中做修改让某个task_struct固定到某个/某些core上跑。这些设置affinity的API有:
int pthread_attr_setaffinity_np(pthread_attr_t *, size_t, const cpu_set_t *);
int pthread_attr_getaffinity_np(pthread_attr_t *, size_t, cpu_set_t *);
int sched_setaffinity(pid_t pid, unsigned int cpusetsize, cpu_set_t *mask);
int sched_getaffinity(pid_t pid, unsigned int cpusetsize, cpu_set_t *mask);其中:mask是掩码,比如设置成0x0110,即按照比特位对应让task在core1或者core2上跑。
② 可以使用工具taskset去设置task affinity:
taskset -a -p 01 19999
taskset -a -p 02 19999
taskset -a -p 03 19999其中:-a是进程中所有线程,-p是core,后面数字是进程PID。
中断负载均衡
除了task_struct以外,占用CPU资源的,还有irq和softirq。
在Linux内核中irq(上半部)和softirq(下半部)的区别是:
- irq不能耗费太长时间,通常会将长时间任务放到softirq中去执行
- softirq是可以被irq打断的,但是irq自身是不支持嵌套的
因此,当在某些场景下,比如网卡的流量很大时,通常会发现CPU花费在irq和softirq的时间很长,因为其中会有大量的网卡irq和softirq产生同时softirq需要大量时间去处理TCP/IP等网络协议栈的内容。
在这些场景下,通常就需要考虑做irq的负载均衡了——irq affinity。即,irq/softirq不绑定在某一个core上一直处理,而是平均发派到几个core上处理。
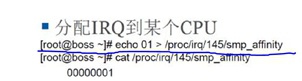
最典型的irq affinity设置是网卡的,如下显示了将网卡4个接收发送queue的irq(不同irq号)设置到不同的core上去做处理:
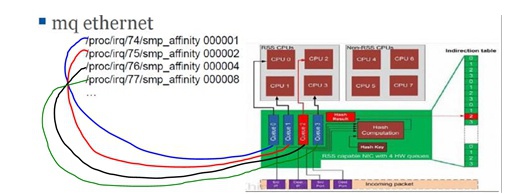
现在很多网卡都是multi-queue的,可以按照以上去设置irq affinity,但是也有很多网卡确实很挫的,它只有一个queue,那么就只能有一个core去处理该irq/softirq。而Linux内核对于irq/softirq的处理是:irq与softirq必须在同一个core上处理。结合上面网卡情况,在网络包很多时就会造成softirq不停被irq打断,会积累很多待处理的softirq,形成系统性能的瓶颈点。
Google近几年对内核做了很多优化,针对上面情况,推出了一个RPS补丁:
虽然有些网卡只有一个queue绑定一个irq,但是可以在irq处理(irq_exist())完触发softirq(invoke_softirq())处理TCP/IP网络协议栈包时,分散到不同的core上去做处理,这就避免了一核有难七核围观的尴尬情况。这个技术被命名为RPS。
- RPS的使能方法是:
echo fffe > /sys/class/net/eth1/queues/rx-0/rps_cpus //即将除了core0以外的其它core都加入到参与TCP/IP网络协议栈softriq的处理工作中- RPS的实现机制:
当一个core上收到irq之后,通过IPI核间中断通知其它core去处理后续的softirq部分。
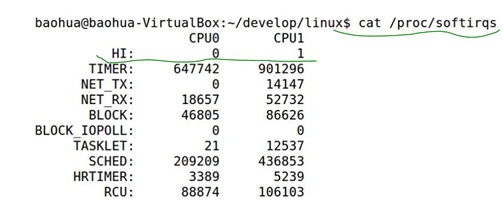
而查看系统内中断的情况使用cat /proc/interrupts。
cgroups和CPU资源分配
cgroup是Linux系统的重要资源控制feature,能通过在不同控制组cpu/memory/io/scheduler等等内创建不同的组群/子组群+不同组群设置不同策略等操作,去控制加入“不同控制组”的各个task_struct的cpu、memory、io、scheduler等等各种资源使用。
Android在5.0之后的版本就使用了cgroup组群控制去将进程分类,比如前台交互进程、后台非交互进程等等,然后将这些进程加入对应的前台组群、后台组群并设置不同的策略:
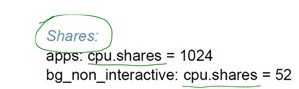
说明:以上将前台控制组“权重”设置为1024,后台控制组“权重”设置为52,这样前台能获得更多比例的CPU资源。
除了以上通过“权重”比例去控制CPU资源使用,还可以通过限制task使用的“配额绝对值”去配置等等。
比如,当我们用docker run去启动一个容器的时候,通常Linux内核是默认将它加入到一个cgroup控制组的。但是我们也可以直接在启动时指定改docker使用的cpu资源不超过250%:
docker run --cpu-quota 25000 --cpu-period 10000 --cpu-shares 30 linuxep/lepv0.1Linux与实时操作系统
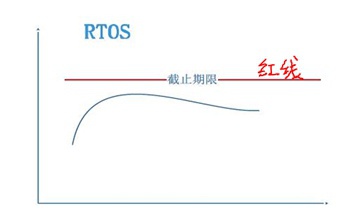
这里的“实时”并不是“即时”,它指的是task的执行截至期限是“可预期”的,即执行延迟是确定的,而不是立即执行。
实时性根据可能导致的“后果”分为:
- 硬实时:
一旦task执行期限超过“预期的门限值”,其后果将是无法接收的、灾难性的。比如导弹发射系统,必须是硬实时系统。
典型的硬实时操作系统RTOS:
- 软实时:
尽量去保证“预期的门限值”,而不能必须确保,一旦出现超过“预期的门限值”的情况,其后果其实并没有什么严重的。
Linux就是典型的软实时操作系统:
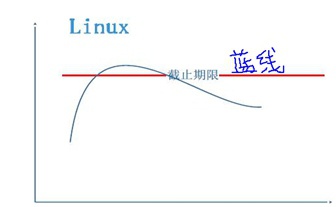
Linux的延迟不具备确定性,这也是Rich OS的共性(富操作系统是指应用场景丰富的支持各中各样应用)。

说明,其中第③和第④的区别是:③关掉了抢占调度,此时该core已经不能进行调度了,只能跑该task而不能被其它task抢占;
Tips:
抢占发生的时机很多,即抢占点很多,比如从系统调用返回啊、从softirq返回当前task啊等等,很难记全。因此可以反向去记忆不可抢占时机,其它时机认为都可抢占,不可抢占时机有:
① 中断
② 软中断
③ task中调用spinlock/preempt-disable等关抢占类操作
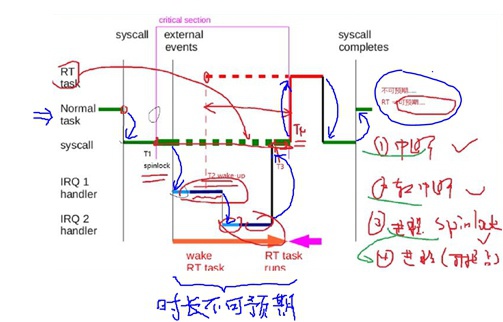
说明,一个普通进程在某个core上运行过程中可能会发生的事情:
① 该进程执行syscall系统调用,从用户态陷入内核执行,然后在T1时刻拿来spinlock;
② 然后被一个中断IRQ1打断,开始执行IRQ1的中断、软中断;
③ 在IRQ1的软中断中间,它在T2时刻唤醒了一个实时线程RT task,但是因为抢占关闭,RT task只能等待;
④ 然后在IRQ1的软中断处理结束时洽好又被另外一个中断IRQ2给打断,开始执行IRQ2的中断、软中断;
⑤ 在IRQ2的软中断处理完毕后,T3时刻回到占有spinlock的普通进程继续执行,此时抢占依旧关闭中;
⑥ 当普通进程释放spinlock的T4时刻因为抢占被开启,这时RT task执行抢占,开始被调度运行,普通进程被挂起;
⑦ 当RT task执行完毕后,调度继续执行普通进程,直到syscall系统调用结束;
⑧ 返回用户态继续执行;
整个过程从T1拿住spinlock到T4开始执行RT task这段时间是不可预测的,因为不知道会来多少中断、执行的长短是如何的等等。
这个图上面标记的一类、二类、三类区间都会堵住抢占的发生,当普通进程的优先级/nice值等等调整都会导致core runqueue队列发生改变,只要core runqueue发生改变就可能会发生抢占,但是由于一二三类区间的存在导致抢占并不是立刻发生,因此这部分区间处理的“不确定性”就堵住了“Linux的硬实时性”。
Preempt-RT对Linux实时性改造
Linux的实时性改造是Linux Foundation的一个Project,其中的代码并未并入Linux Kernel Mainline,而是处于以patch单独维护的状态中。
这些RT Patch做的事情基本就是对上一节提到的一二三类区间进行改造:
- 第一类区间:IRQ改造:中断线程化
- 第二类区间:Soft IRQ改造:软中断线程化
- 第三类区间:Spinlock改造:都修改成Mutex,不再关调度
这样,就将这些不可抢占的区间变换为可抢占的区间,有高优先级任务可以立即抢占,这样就将RT task的执行变得可预期,将Linux变为一个硬实时系统。具体可见RT补丁的源码

另外需要注意的是:RT-Linux补丁打上之后在写代码方面会遇到很多很多坑,调度变成实时的也不代表Linux就变成实时的,比如有无数的内存管理的坑。例如,内存管理中用户态内存的写时分配、PageFault触发,此时就不是实时的,这些都是在写code时是需要注意的点。
因此,对于Linux的实时性改造,既可以用RT-Linux补丁将Linux内核改造成实时的,也可以并行再跑一个RT操作系统做成双系统,让它们分别泡在不同的core上。
目前RT-Linux的patch打上之后,Linux实时性能可以做到100us的量级,还做不到vxworks那种us量级。
当然了,可预期的是,相应的Linux调度的吞吐会下降。
参考文档